
川达信息科技
主要产品有塔吊可视化系统、塔机安全监控管理系统、卸料平台安全监测系统、升降机安全管理系统、人脸识别机控制系统、楼层呼叫器、扬尘监测系统等安全监控产品,产品得到客户的广泛认可,年产规模达到万台以上。
始终把顾客的利益放在首位、以人才为根本、视质量为生命,努力开拓,不断创新,在提供客户满意的优质产品的同时,提高自我完善的能力,促进长足发展,为科技进步做出贡献,用心做好智慧工地产品研发生产一件事。
第三代 HCTJ-11 塔机安全监控管理系统是集互联网技术、传感器技术、嵌入式技术、数据采集储存技术、数据库技术等高科技应用技术为一体的综合性新型仪器。该仪器能实现多方实时监管、区域防碰撞、塔群防碰撞、防倾翻、防超载、实时报警、实时数据无线上传及记录、实时视频、语音对讲、数据黑匣子、远程断电、精准吊装、塔机远程网上备案登记等功能,特别是该仪器的后台着重加强了监管部门对塔机的管理备案程序,是新形势下,主管部门和各工地业主人性化服务,高效执法的有效手段。
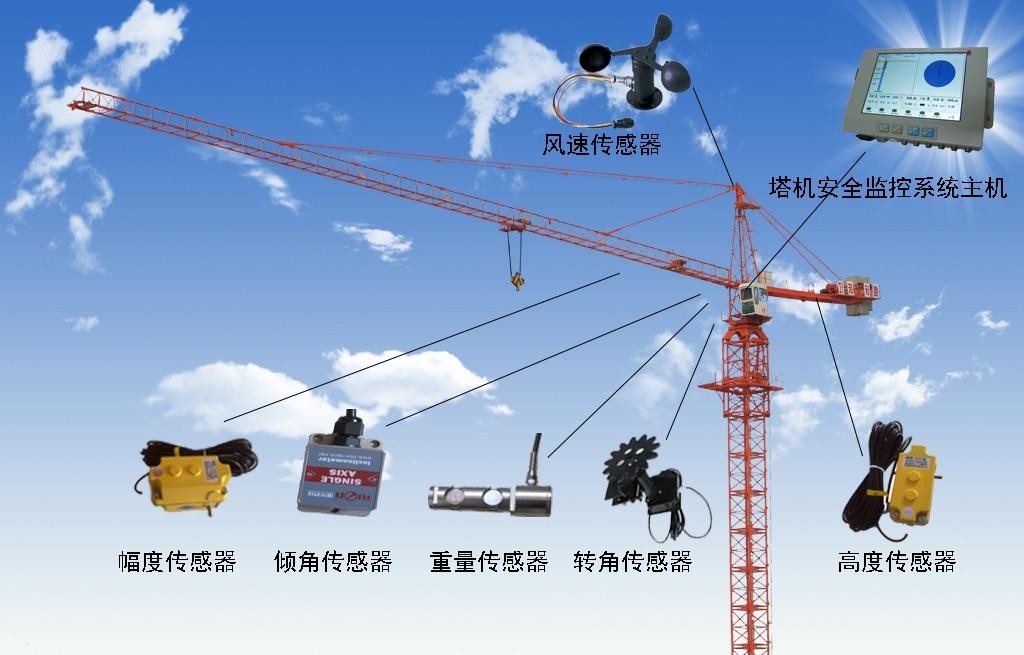
本系统由塔机安全监控管理系统主机和远程监测管理平台组成。主机安装在工地现场塔机上,并连接幅度、高度、转角、重量、倾角、风速等传感器,且具备内置制动控制和数据存储等功能;主机 8 英寸显示屏能人性化显示工地现场塔机运行状况;无线网络能把塔机的各种健康参数实时上传到远程监测管理平台;
管理平台开设不同权限的用户,可实现特定权限下的查看和管理。通过该平台可以实现塔机网上申报、建机科经办审核、建管处审批、监控登记、实时监控、统计分析等各项功能。便于工地现场管理部门及安监机构对塔机进行实时在线监管、安全状况分析、塔机网上备案和登记情况、塔机开工统计、塔机地理位置显示和历史数据分析等。对于违反操作的塔吊可实现实时预警、高效处置提供极大便利。
1.1、产品特点
1、功能齐全
本产品能实时监控塔吊运行中的高度、幅度、转角、风速、倾角、吊重、力矩等实时参数。
2、防碰撞功能完善
准确标定塔机坐标及角度后无需控制器即可实现多台塔机的自动连接组网功能;塔群施工监控,防止塔群间碰撞;区域防碰撞设置安全、有效。
3、调试简单数据自动采集
进入调试界面后,选定指定项目然后开启塔机各项基本运行动作即可完成数据自动采集,调试简单便于安装人员高效、精准完成工作。
4、力矩曲线丰富
监测管理系统内置近百种最新塔机型号的力矩曲线,可根据塔机铭牌中塔机型号自由选择,便捷灵活。
5、真人语音报警
在塔机驾驶员违规操作时,主机立即真人发声预警、报警并在屏幕上显示红色预警、报警项目,双管齐下及时提醒驾驶人员处置。
6、产品设计合理
产品设计体积小、功能全、外观简洁大方,大大优于同类产品,便于在狭小塔机室内安装。
7、安装简便
精巧设计夹具,简化安装步骤,减少安装人员高空作业时间。
8、维修便捷
模块化设计,极大方便设备维修、保养,减少维护费用。
1.2、产品配置
10.1 英寸显示屏,重量传感器,力矩传感器,风速传感器,转角传感器,倾角传感器,幅度传感器,无线网络;
1.3、技术参数
电气参数:AC220V
工作环境温度:-30℃~60℃
整机功耗:25W
工作湿度:小于95%(25℃)
报警音量:大于60db
工作方式:连续工作
工作误差:小于0.5%
震动:加速度≤5g
报警方式:声音、图像报警
1.4、系统组成及性能系统
构架图:

系统部件的组成:
序号 | 名称 | 数量 |
1 | 主机 | 1 台 |
2 | 转角传感器 | 1 套 |
3 | 幅度传感器 | 1 套 |
4 | 倾角传感器 | 1 套 |
5 | 风速传感器 | 1 套 |
6 | 力矩传感器 | 1 套 |
7 | 高度传感器 | 1 套 |
8 | 电源线 | 1 根 |
9 | 天线 | 1 套 |
10 | 安装夹具 | 1 套 |
11 | 尼龙齿轮 | 1 个 |
12 | 尼龙滑轮 | 1 个 |
13 | 配件包 | 2 个 |
HCTJ 塔机安全监控管理系统的主要性能:
序号 | 种类 | 项目名称 | 指标 |
1 | 转角传感器 | 量程 | 0~360º |
分辨率 | <0.18º | ||
2 | 幅度传感器 | 量程 | 0~80m |
分辨率 | <0.05m | ||
3 | 高度传感器 | 量程 | 0~100m |
分辨率 | <0.05m | ||
4 | 重量传感器 | 量程 | 2~20t |
分辨率 | <50kg | ||
5 | 风速传感器 | 量程 | 0~40m/s |
分辨率 | 0.1m/s | ||
6 | 倾角传感器 | 量程 | 0~15º |
分辨率 | 0.01º |
1.5、安装环境
为了保证设备可靠工作,产品安装环境要求如下:
1、供电电压应符合设备要求,且妥善接地;
2、将设备稳固安装,防止任何部件脱落和机械损伤;
3、连接线应妥善布置,远离机械运转结构,并防止对人员构成伤害;
4、主机应远离热源,保持排风口通畅;
5、将主机放置在干燥的环境中,避免雨淋。
1.6、产品外观图:

1.7、主界面及设置界面
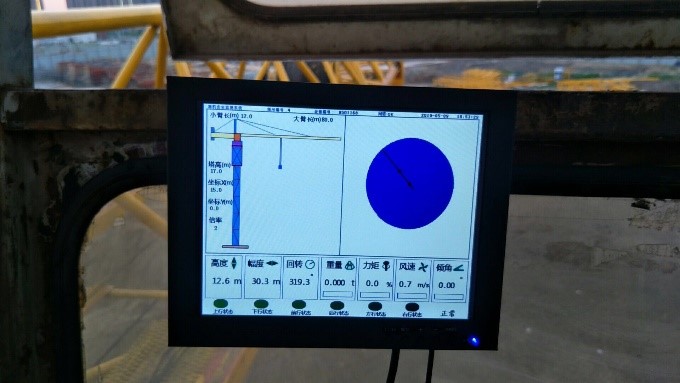
1.主界面
主界面是用于显示塔机各项运行参数的界面,各显示项目方便塔机操作人员及时了解塔机实时运行状态,并且通过观察主界面上参数显示随时调整塔机运行状态,保证塔机安全工作。
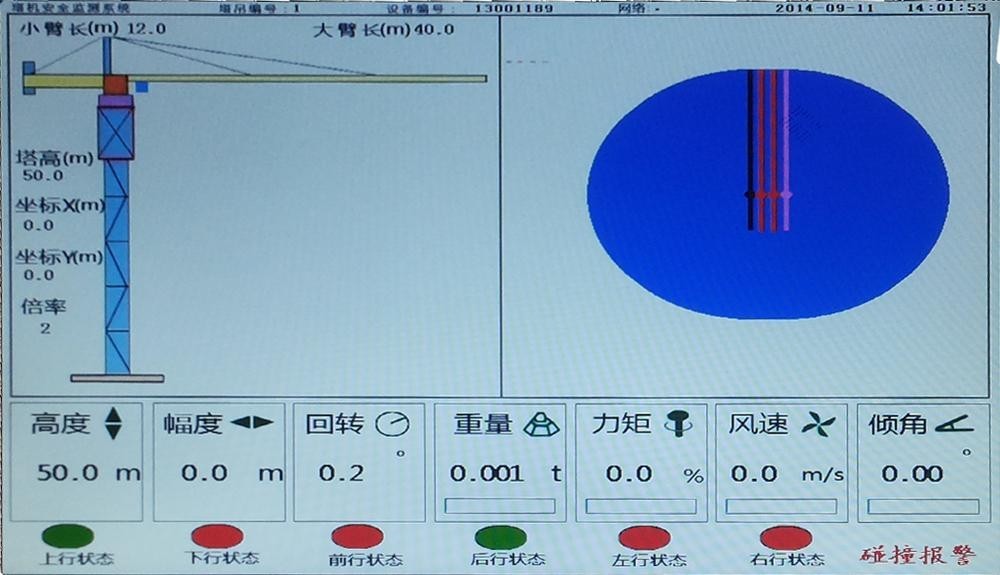
主界面注解
名称 | 注解 |
塔机号 | 塔机在施工现场编号 |
设备编号 | 塔机的网络编号 |
坐标(X.Y) | 塔机的位置 |
塔高 | 塔机的当前高度 |
塔臂 | 塔机的塔臂长度 |
高度 | 塔机塔钩的当前位置 |
幅度 | 塔机小车的当前位置 |
转角 | 塔机大臂当前角度值 |
重量 | 塔机当前载重 |
风速 | 施工现场当前风速 |
倾角 | 塔机塔身倾斜角度 |
力矩 | 塔机大臂力矩 |
网络 | 显示网络状态 |
倍率 | 显示塔机钢丝绳倍率 |
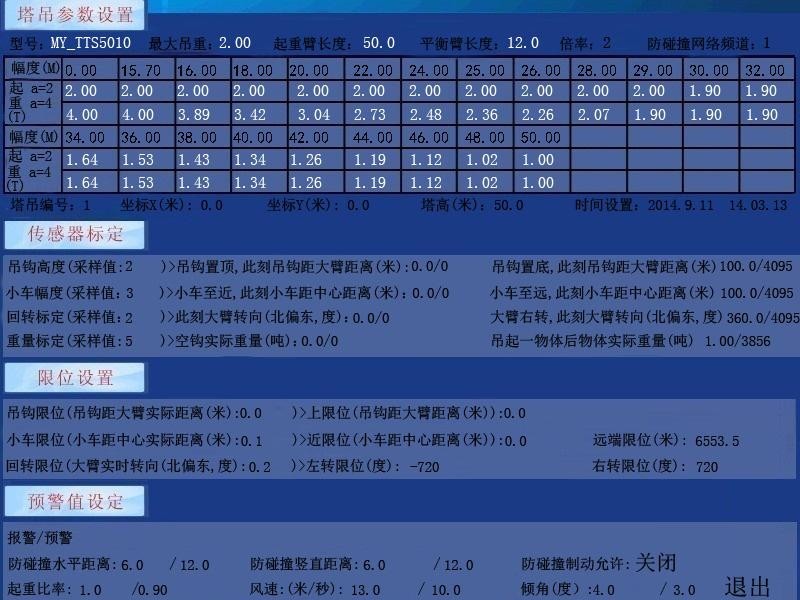
2.设置界面
设置界面主要通过传感器的标定来保证主界面显示项目的准确性。(设置界面的使用方法将在“调试”中详细介绍)其显示项目如下:
设置界面注解
1.8、使用方法
1、主机未设计开关按钮,塔机通电时,主机开始工作。
2、主机正面设有语音大小调节功能建,在正常工作界面下按击“增加”按键可以增大语音;按击“减小”键可以减小语音音量。这里应该注意,不要将音量调整至太小,防止遇到危险情况是,塔机驾驶员没有听到危险提示,导致危险发生。
3.塔机在升高后,我们的监测系统会自动检测到塔机高度的变化,在有有效吊重的且塔机高度增加的情况下,系统会自动将新的塔机高度录入系统中;此时需要重新启动机器(将机器重新上电),系统便可接受新的塔机高度。
1.9、常见疑问和故障排除
1、主机出现黑屏或者出现屏幕闪烁怎么处理?
答:检查监控管理系统主机电源线是否插紧,必要时联系当地的售后服务人员。
2、主机通电后网络不能显示 OK 怎么处理?
答:1)保证机器中的 SIM 卡没有欠费,并检查天线是否连接完好;
2)拔下电源重新通电,等待 5 分钟;网络如若仍未显示 OK,将主机断电并取出机器中的 SIM 卡,在重新插入机器中,并给机器通电;
3、重量传感器安装好之后,秤吊重物,重量采样值没有读数怎么处理? 答:1)检查重量传感器的接口是否正确接插到主机的相应接口处
2)重量传感的受力方向是否正确,可依照传感器上的受力方向箭头判断。
4、安装了该套设备会不会影响塔机正常作业?
答:该套设备完全附加式安装,完全不影响原塔机的机械结构及供电系统, 系统会在塔机遇到危险情况是自动提醒塔机操作人员谨慎驾驶。
1.10、售后服务及维修范围
1、本系统实行一年保修,终身维护。
2、保修期的起始日期以产品发票为准。
3、有以下情况之一者,不属于保修范围:
1) 用户使用、保管、维护不当造成的损坏;
2) 非本公司指定人员自行拆装修理而造成的损坏;
3) 非正规渠道购买、无有效发票;
4) 因不可抗力造成损坏。
4、不属于保修范围内的产品,本公司售后服务部门仍热情为你服务。
第二章 安装图解篇
2.1、产品外形及包装


主机 高度传感器 幅度传感器
2.2、安装位置
2.3、主机安装
主机应安装在尽量少的遮挡驾驶员观看工地现场,且容易观看仪表画面的地方,可以使用扎带固定,也可以使用六角自攻螺钉固定。

2.4、传感器安装
1、 高度、幅度传感器安装
1) 据塔机原有限位器的高低,将底板正面或反面插入塔机原有限位器下方。
2) 将连接钩一端勾在塔机原有限位器固定柱上,调节另一端用螺丝固定。
3) 将传感器放置于安装板上用同轴器连接塔机原有限位器,保持同轴。用开口销固定同轴器并拧紧。
4) 将传感器的固定脚用螺丝固定在安装板上。
2、重量传感器的安装
1)把重量传感器夹具后座安装于塔帽横梁上或大臂上;
2)将钢丝绳置于尼龙滑轮和 U 型架之间;
3)安装重量传感器并用销轴插片固定;
4)把 U 型架和后座通过销轴连接固定。(若距离较远时可以使用延长杆连接上述两者)。

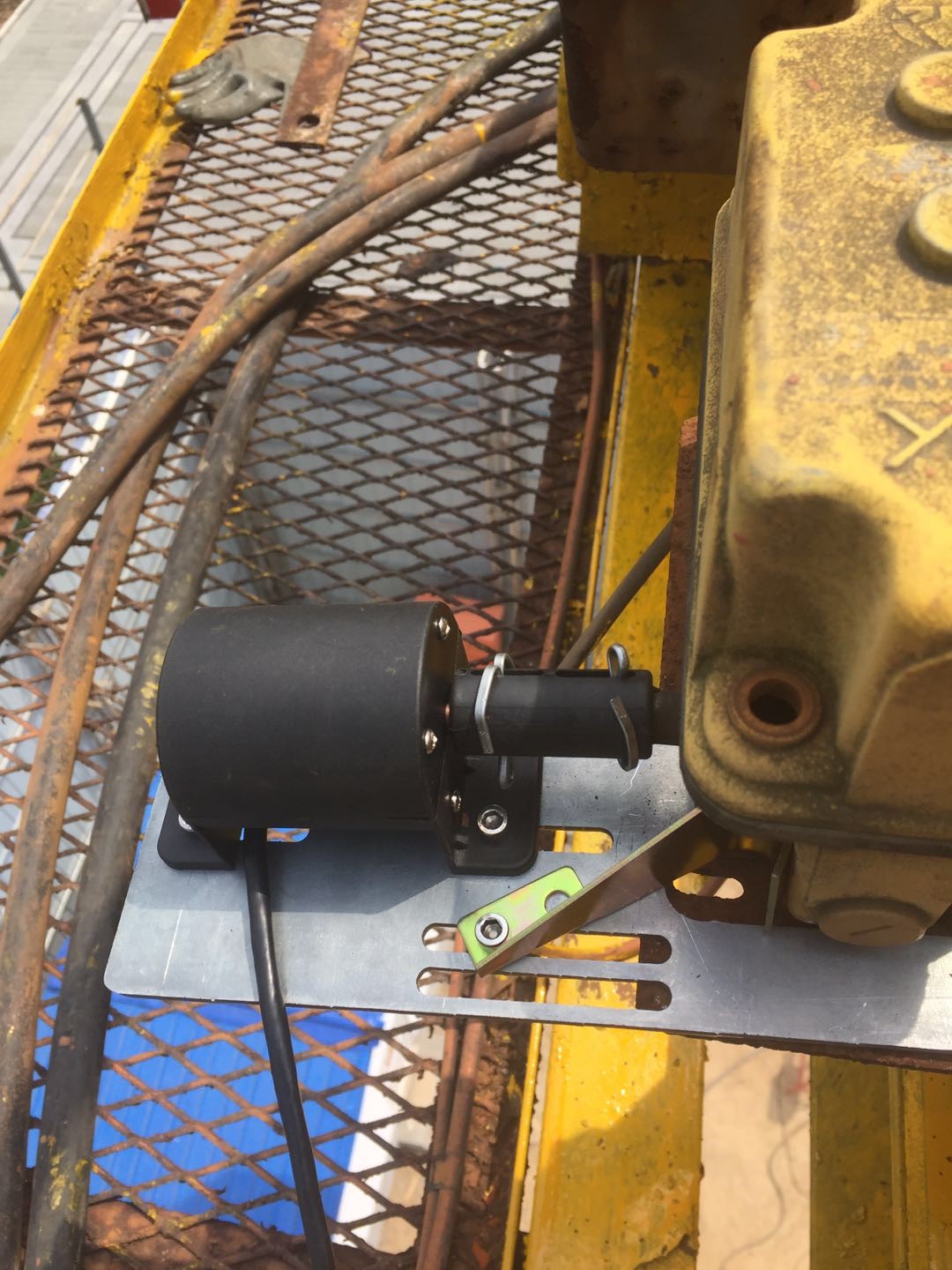
3. 角传感器的安装
1)选择合适的齿轮盘插在传感器的旋转轴上用销钉固定。

2)调整好齿轮盘与塔机转盘齿轮咬合的距离,将转角传感器用螺丝固定在塔机转盘裙边处,拧紧即可。
4、风速传感器的安装

可使用电钻和六角自攻螺钉将其固定。
第三章 调试说明篇
各传感器按照安装图解安装完成后将各传感器航空插头接入主机相对应接口即可进行塔机安全监控管理系统设备的调试。
3.1、调试的目的
塔机安全监控管理系统安装完毕,在调试之前是不能正确显示塔吊的各种实时参数的,不能正确报警或制动输出的,调试工作是设置塔吊基本属性的工作(例如塔吊型号,力矩曲线,倍率,坐标等),传感器的标定设置,限位设置,报警阀值设置等。

3.2、调试功能按键功能说明
“选择”按键:1.选中当前光标停留的选项;2.确定且保存参数; “退出”按键:1.不选中当前参数且不保存数据;
“增加”按键:1.调整需要选择的选项;2.增加设置的值;3.增加音量; “减小”按键:1.调整需要选择的选项;2.减少设置的值;3.减少音量;
界面上需要设置的参数为颜色分别为白色,淡紫色,大红色三种类型。白色为 未选择的参数,淡紫色为选择的参数,大红色为选中且正在设置的参数,所有 的参数在同一时刻只有一个能被选择或被选中。
3.3、调试步骤
1)进入界面
同时按住“选择”和“退出”键,等待弹出密码窗口,等密码弹出窗口出现。再按一下“选择”键选择第一个数字“5”,然后按“减小”键,直至减少到 0。再按“选择”键确认。再按一次“减少”键进入第二个密码框,以同样的方法输入0,当三个密码框显示密码为 000 时,连续按两次“选择”按键,即可进入设置界面。
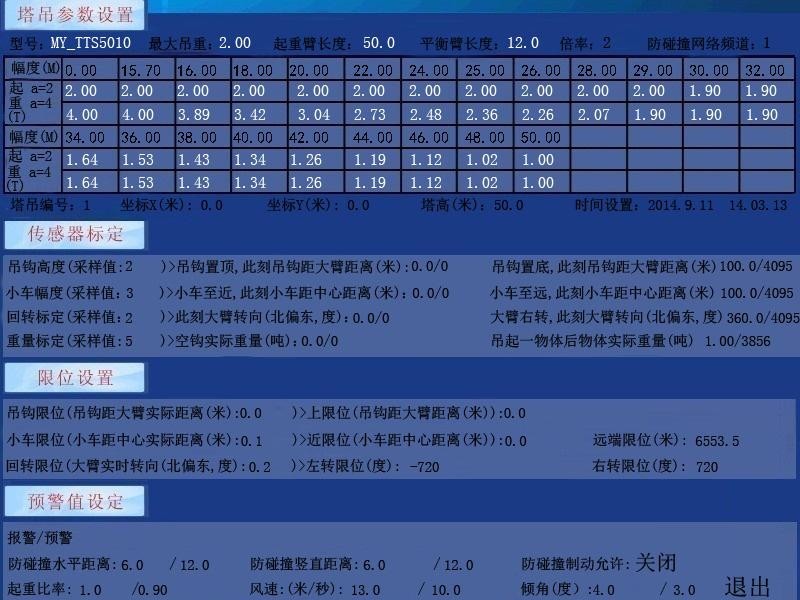
2)塔机相关参数标定
塔吊型号: 选择相应的型号,以实际臂长和最远端的吊重为依据进行塔吊型号的匹配;
起重臂长度:若塔吊大臂被截下部分,与匹配的臂长不符,可以设置成实际长度, 否则无需改动
平衡臂长度:平衡臂实际长度若与匹配的长度若不一致,可以设置成实际长度, 否则无需修改;
倍率: 吊钩钢丝绳的实际根数,按实际根数设置 2 或者 4;
防碰撞网络频道:只有同一个网络会实现防碰撞,一个工地一个频道,相邻的两个工地必须使用不同的频道。
塔吊编号: 塔吊在工地塔群内的编号,按实际编号设置,一个塔群内的塔吊编号不许重复,尤其在防碰撞系统中,重复的塔吊编号会导致系统的错乱;
坐标 X,Y: 本塔吊在工地现场的相对坐标,可以是绝对坐标系的后 3 位尾数。在防碰撞系统中由安装人员将工地塔吊坐标平面图纸发送给厂家,厂家技术人员以短信形式告诉安装人员具体坐标。在非防碰撞系统中,坐标可以不标定。
塔高:塔吊大臂的实际高度,计算基准值是吊钩能放到的最低点;若在防碰撞系统中,所有塔吊高度计算的基准值必须一致。
时间设置:系统上线后会和服务器同步时间,一般无需人工设置。
3)传感器标定
传感器标定包括吊钩高度传感器,小车幅度传感器,回转传感器,重量传感器的标定,风速和倾斜无需标定。传感器标定的过程是:塔吊处在一定状态,分别在两个不同的点读取同一传感器两点相应传感器的采样值(也叫刻度值),并且输入两点的实际值,原理是通过告诉系统仪器某传感器两个不同的刻度值对应的两个实际值是多少,仪器以此来实时计算某传感器在任何一处的实际值是多少。
1.高度标定

将吊钩升到最顶端,读取顶端采样值且保存,设置此时吊钩离大臂的实际距离且保存;
将吊钩放到地面,读取底端采样值且保存,设置此时吊钩到大臂的距离且保存;(距离约为塔高设置的值);
注:若在吊钩上升或者下降的过程中,选择顶端采样值或者选择底端采样值(字体为大红色),此值或随着吊钩的运动线性,均匀的增加或减小。采样值的范围在 0—4000 之间,刚完成安装后,采样值一般在 2000 左右,采样值从 4000 多跳到 0 或者由 0 跳到 4000 多均需重新调整传感器。
2.幅度标定

幅度标定方式同高度标定,近端指的是将小车收回来到驾驶室最近处,远端指大臂末梢;
3.回转标定

回转传感器的安装应在塔吊电缆绳无扭曲情况下安装,首次读取值也应该在2000 左右。非防碰撞系统中将大臂指向正东,读取当前采样值且保存,设置当前实际方向为 90 度且保存;
将大臂右转半周,指向正西,读取当前采样值且保存,设置当前实际方向为 270
度且保存;
对于防碰撞系统的标定,安装人员需告知厂家现场塔机坐标采样图纸,厂家技术人员会以短信的方式告诉安装人员准确的标定角度。
4.重量标定

将吊钩放到地面,空钩,读取空载采样值且保存,设置空载实际重量为 0 吨且保存;吊起已知重量的重物(如标准节或者整卷钢筋等),读取负载采样值且保存; 设置负载实际重量值为刚才吊起重物的实际重量且保存。注:负载的采样值会随着重量的增加而增加,所以在实际重量标定过程中负载采样值一定是大于空载采样值的,空载的采样值一般会在 100 左右。
5.限位设置

限位设置是设置吊钩,小车,转角限位的。
吊钩限位起点值一般设置为 0.5 米到 2.5 米,视实际情况而定;终点值无需设定;
小车限位起点值一般设置为 1.5 米到 3 米,视实际情况而定;终点值大约设置为臂长减去 1.5 米;
回转限位起点值为回转左限位点,终点值为回转右限位点。将大臂左转至现场实际需求左限位点,读取限位值且保存。将大臂右转转至现场实际需求右限位点, 读取右限位值且保存。按照国标规定回转最多为单向旋转 3 周。
6.报警设置

一般无需设置,安装默认即可。